
AVL Cruise 2014
附带安装教程- 软件大小:1034 MB
- 更新日期:2019-06-17 13:48
- 软件语言:简体中文
- 软件类别:辅助设计
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
AVL Cruise 2014是一款专业整车及动力总成仿真分析软件,新版本中的新功能和增强功能包括:工作负载分析工具、数据库:智能过滤、任务:任务中参数的重组、车轮组件:滚动半径根据车辆负载而变化、CAMEO:添加了两个新的插值算法,INN2和更新的多项式算法等,强大之处不言而喻;智能过滤是一种新的数据库功能,允许用户从中加载数据一次为多个组件提供CRUISE数据库;这个想法就是用户选择车辆模型中的一些组件并指定一些属性(标识1,Ident 2,Ident 3和Comment)他可以过滤一组组件,在不选择过滤器的情况下,过滤器对话框将列出所选组件的所有数据集,在智能过滤器中用户在左侧列表中看到所选组件的对话框和过滤器列表匹配组件在右侧;强大又实用,需要的用户可以下载体验

新版功能
1、Clutch模块
Clutch模块用于模拟手动变速箱的摩擦式离合器模型,最大传递转矩是摩擦式离合器的主要性能。最大传递转矩可以通过输入的结构尺寸参数来计算,也可以直接输入。Clutch可以由Driver通过离合器踏板行程控制,或者由Clutch Control、Clutch Program来控制。
该模块需要输入的主要参数有:离合器输入、输出转动惯量、离合器所能传递的最大转矩、离合器摩擦片的内外工作半径、摩擦面数等。
2、Gear Box模块
Gear Box模块中,考虑了传动比、转动惯量和转矩损失等因素,将驱动端的输入转矩转换成动力输出端的输出转矩。
该模块需要输入的主要参数有:挡位数目、各个挡位的传动比、每一挡位的驱动输入端和动力输出端的转动惯量、每一挡位啮合齿轮齿数等。
3、Single Ratio Transmission 模块
Single Ratio Transmission模块用来模拟主减速器,与Gear Box模块类似,不同的是该部件只提供一个传动比。
该模块需要输入的主要参数有:主减速比、驱动端和动力输出端的转动惯量等。
4、Differential模块
Differential模块用来模拟差速器。考虑了转动惯量,该部件可以把驱动端的输入转矩分成两个动力输出端的输出转矩,或者把两个动力输入端的输入转矩求和。另外,该部件还提供了差速锁。
软件特色
1、通过模块化的建模方式,可以快速将传统车辆改变为先进动力传动系统,并支持分层建模,方便客户管理各个子系统。
2、Cruise内置了很多基于汽车工程应用的计算任务。主要有循环工况任务、巡航工况任务、最大爬坡度计算任务、稳态行驶性能任务、全负荷加速性能任务、制动/滑行/反拖任务以及最大牵引车计算任务等。
3、有大量的电气部件,可用于电动汽车或者混合动力汽车的开发;立体式全方位的接口,便于进行整车集成测试;也可以对先进动力传动系统进行分析评价,例如:AT、AMT、DCT和GSI等,其中的GSP模块可进行换挡规律的生成和优化。
4、根据预先设定的动力性、燃油经济性或者排放性指标,可以进行动力参数匹配计算和动力总成匹配计算。
5、内置Function函数,用户可以根据自己的需求编写控制策略。
6、Cruise软件可以与AVL In-Motion、dSPACE和ETAS等硬件系统进行耦合仿真,实现车辆动力总成系统的实时(Real Time)仿真也可以调试和分析控制系统,缩短了开发时间并且提高幵发速度。
7、可同时进行正向仿真和逆向仿真。正向仿真是指驾驶员根据车速要求,通过调整油门踏板和制动踏板,使实际车速跟随目标车速的过程,这个过程由于存在驾驶员的主观意识和调整过程,因此实际车速会围绕目标车速呈小幅波动趋势,波动的幅度与控制器的控制特性有关;逆向仿真是指根据车轮的转矩(功率)需求逆向推导发动机的输出转矩;只要该需求转矩在发动机可提供的范围内,逆向仿真可确保实际车速与目标车速完全一致。
8、采用与Oracle对接的数据库管理体系,便于进行系统的管理和资源分配,提高了数据管理的安全性,同时方便实现Cruise软件不同使用群体之间的数据交换和数据读取;强大的数据搜寻和对比功能,使用户在面对大量的数据的情况下可根据自己设定的边界条件便捷的进行数据的获取和对比。
安装步骤
1、用户可以点击本网站提供的下载地址下载得到对应的程序安装包,解压后即可使用

2、弹出应用程序文件解压界面,等待一回儿即可,弹出安装向导,点击下一步按钮即可
3、用户可以随便填写信息,也可以根据自己的实际情况进行填写
4、点击我同意该应用程序安装许可协议,然后点击下一步按钮即可

5、可以根据自己的需要将安装地址进行更改,需要记住该地址
6、弹出程序安装选择系统界面,用户根据自己电脑系统选择即可

7、安装模式可以根据自己的需要进行选择,经验稍微少的用户可以默认
8、该界面可以直接点击下一步按钮,不需要点击太对的操作
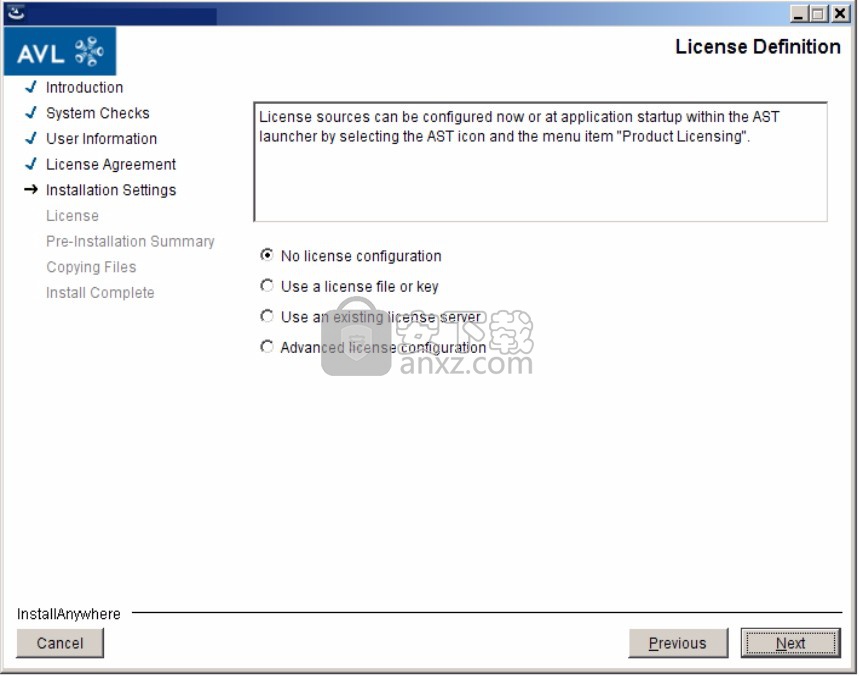
9、选择第一项“No License…”,单击Next
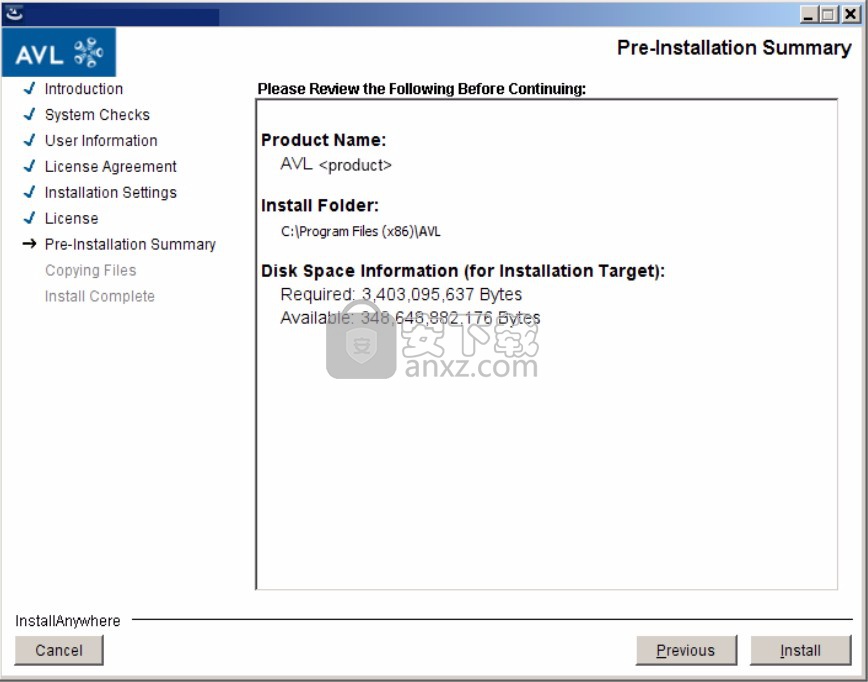
10、确认安装信息后,点击Install开始安装,安装完成后先不要运行应用程序
11、安装完成后,点击完成按钮,现在只需要等待程序安装完成
12、应用程序安装完成后,会弹出一个程序安装完成界面,点击退出按钮即可
方法
1、打开安装包的SolidSQUAD文件夹,解压AVL.CRUISE.2014-SSQ.7z文件,然后将解压的文件复制到软件安装目录下的覆盖同名文件。
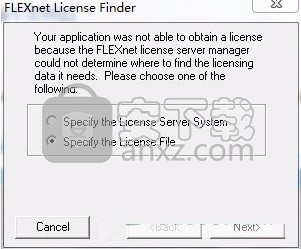
2、打开桌面上的软件图标,打开软件,选择第二项“Specify the License File”,单击Next

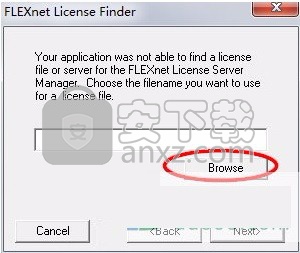
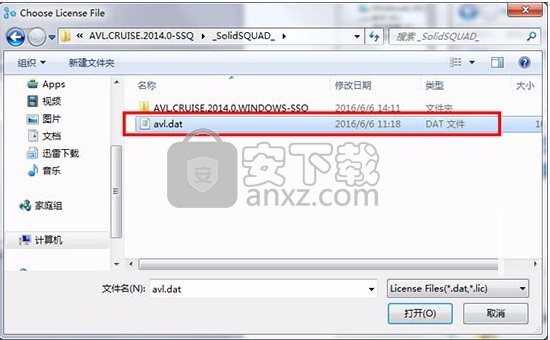
3、进入下个界面,单击Browse,选择安装包内SolidSQUAD文件下的avl.dat
4、单击finish,完成。

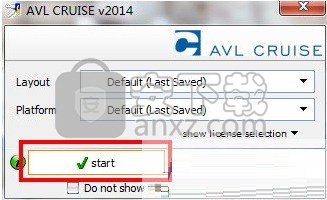
5、选择start,进入软件主界面如下所示。
6、完成以上操作步骤即可将应用程序完成

使用说明
随机循环发生器(RCG)
随机循环发生器(RCG)是一种创建驾驶循环的工具。
RCG读取驾驶从MATLAB文件循环,随机选择用户指定的数量和组合他们进入一个单一的驾驶循环。 RCG包含连接的选项
个别驾驶循环,包括过渡,速度范围和休息时间。
RCG还可以检查并确保特定车辆的驾驶循环的可行性限制所选循环的最大加速度。
RCG的总体思路是创建一个工具,可以快速生成用于CRUISE的驾驶循环。
电池参数化向导(BPW)基于经验公式的电池模型已在CRUISE和CRUISE中实施火。
使用经验公式来关联锂离子的电压响应电池单元的电流,时间和温度。经验关系包含许多通过分析拟合实验放电/充电获得的拟合参数不同放电/充电速率和温度的曲线。
原则上,每个电池单元格必须识别单个拟合参数集。
但是,对于电池单元类似的大小和容量,可以使用相同的参数集。
经验,即适合这种型号可以显示许多不同的电池单元,以哪种方式显示拟合参数与细胞类型相关。
电池参数化向导使用非线性回归拟合实验放电曲线,得到拟合参数可以直接用于CRUISE和Electro-thermal中的经验电池模型FIRE中的模型。
车轮组件:滚动半径根据车辆负载而变化
CRQ_106372
在车轮组件中,可以将动态滚动半径称为多个车辆权重。
当用户使用不同的任务执行多个任务时,这尤其有用车辆重量,因此动态滚动半径将自动调整。
接口
CAMEO:增加了两个新的插值算法,INN2和更新的多项式算法
CRQ_145538
CRUISE已添加对两个新CAMEO算法的支持。算法
有ID:dINN_e052cd07(INN2)和FreePm_d1f9680e(多项式)。
Office导入:用于设置BOOST v2014.x协同仿真环境的脚本
CRQ_145495
与v2013.x相比,BOOST v2014.x需要一组额外的依赖库。在以前的版本用于设置BOOST环境的脚本,
SetEnvironment_BOOST_win.bat'被放置在CRUISE \ \ bin文件夹中安装。
此脚本已替换为两个针对不同BOOST的脚本版本:'SetEnvironment_BOOST_v2014.x_win.bat'和SetEnvironment_BOOST_v2013.x_win.bat'。
在开始脚本之前,用户需要编辑内部的某些参数。带有详细信息的注释位于脚本中。
MS导出:选择使MS Excel可见
CRQ_124065
在MS导出组件的“属性”中,选项“运行MS Excel可见”是添加。
它默认启用。禁用时,MS Excel将在电子表格中隐藏创建。
附加的NEDC配置文件用于启用“驾驶”模式的自动车辆
对于具有“驱动”模式的自动车辆的额外NEDC配置文件始终具有已添加到配置文件的安装包中。
任务中参数的重组
任务已重组为统一的标准订单。
他们进行了重组每个任务中都有标签,例如进入循环运行,常规,换档,初始值,负载状态等,以及组的所有数据现在都可见而无需滚动。
循环运行任务中还添加了另一个功能。使用的配置文件可视化第一页,以便用户立即知道将模拟哪个驾驶循环。
弹性塑料离合器
CRQ_130050
弹性塑料离合器可作为新的动力传动系统组件使用,也就是所谓的因为它是基于弹塑性数学模型。
这个模型使用内部状态变量,依次接触表面的所有凹凸的平均偏差评估离合器工作的当前运行状态。
假设接触表面的粗糙度就像刷毛一样,有三种可能的操作条件:粘着,预滑和滑动。
该模型还描述Stribeck效应并仅使用一个微分方程来描述不同的离合器的操作条件。
推带式CVT型号
CRQ_117312
引入了动态推带式CVT模块,该模块由轴向夹紧控制军队。该系统包括两个皮带轮和推带。
输入侧的滑轮是被称为主滑轮,而另一个滑轮被称为次滑轮。每个滑轮由一对V形滑轮组成,其中一个滑轮固定在轴上和另一个上一个是轴向可移动的。
有两种控制方法:
- 通过轴向控制夹紧力
- 通过液压活塞位置控制在变速器中,扭矩或动力通过摩擦力从初级皮带轮传递到次级皮带轮推带元件和滑轮滑轮。极低的无级转换通过改变皮带轮夹紧力来实现(低速传动)和高(超速)传动比从而改变可动滑轮滑轮的轴向位置有效运行半径。
人气软件
-

南方cass 65.9 MB
/简体中文 -

迈迪工具集 211.0 MB
/简体中文 -

origin(函数绘图工具) 88.0 MB
/简体中文 -

OriginLab OriginPro2018中文 493.0 MB
/简体中文 -
探索者TssD2017 417.0 MB
/简体中文 -

mapgis10.3中文(数据收集与管理工具) 168.66 MB
/简体中文 -

刻绘大师绿色版 8.32 MB
/简体中文 -

SigmaPlot 119 MB
/简体中文 -

keyshot6 1024 MB
/简体中文 -
Matlab 2016b 8376 MB
/简体中文
 女娲设计器(GEditor) v3.0.0.1 绿色版
女娲设计器(GEditor) v3.0.0.1 绿色版  iMindQ(思维导图软件) v8.1.2 中文
iMindQ(思维导图软件) v8.1.2 中文  Altair Embed(嵌入式系统开发工具) v2019.01 附带安装教程
Altair Embed(嵌入式系统开发工具) v2019.01 附带安装教程  avizo 2019.1(avizo三维可视化软件) 附安装教程
avizo 2019.1(avizo三维可视化软件) 附安装教程  ChemOffice 2017 附带安装教程
ChemOffice 2017 附带安装教程  绘图助手 v1.0
绘图助手 v1.0