GML Camera Calibration Toolbox(相机校准软件)
v7.2 绿色版- 软件大小:6.32 MB
- 更新日期:2019-09-20 15:05
- 软件语言:简体中文
- 软件类别:杂类工具
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
GML Camera Calibration Toolbox是一款非常实用的相机校准软件,此软件可以帮助用户对相机的参数进行校准,同时也支持在校准之后计算相机的固定参数以及失真系数,这将有利于用户对其进行调节,可帮助用户拍摄出质量上乘的照片,并且此软件还可以计算校准图案点的坐标和外部相机参数,用户可根据计算出来的信息来校准拍摄坐标,实时抓取每一时刻的美丽瞬间。此外,本款软件采用的是棋盘结构的校准模式,方便用户对相机的拍摄坐标进行查看,软件仅使用了奇数和偶数的形式才计算相机的校准参数以及坐标,但是这并妨碍用户对相机的参数进行准确的校准和计算,在校准相机的过程中,软件将会自动计算和校准参数,用户无需手动操作,非常的方便快捷,是一款实用性能及强大的相机校准软件,欢迎有需要的用户前来下载使用。
软件功能
在标定之后计算固有摄像机参数和畸变系数。
校准模式点的坐标和外在相机参数也可以计算出来。
每个参数都有一个精度等级。
GML Camera Calibration Toolbox绿色版使用棋盘作为校准模式。它仅使用奇数X偶数(或甚至X奇数)平方(即5x6、7x8、10x7等)的校准模式。
校准过程是完全自动化的。总共有两个棋盘检测算法。第一种是“平方”算法,第二种是“空穴”算法。
软件特色
完全免费,不会收取用户的任何费用
操作简单,没有任何复杂的操作步骤
可帮助用户对相机的坐标进行校准
同时也可对相机的拍摄参数进行设置
支持导出软件的的目录和基本文件的后缀,导出的数据包括每个检测到的图像
支持导出校准数据到电脑中进行保存,方便用户后期对其进行查看
可导出外部相机的参数,包括每个图像的平移(T)和旋转(R)矢量
安装方法
1、找到下载完成的压缩包并解压,然后双击“GML Camera Calibration.exe”应用程序进入安装步骤。

2、选择程序的界面所使用的语言,建议选择英文,选择完成后点击【OK】按钮即可进入软件界面。
使用说明
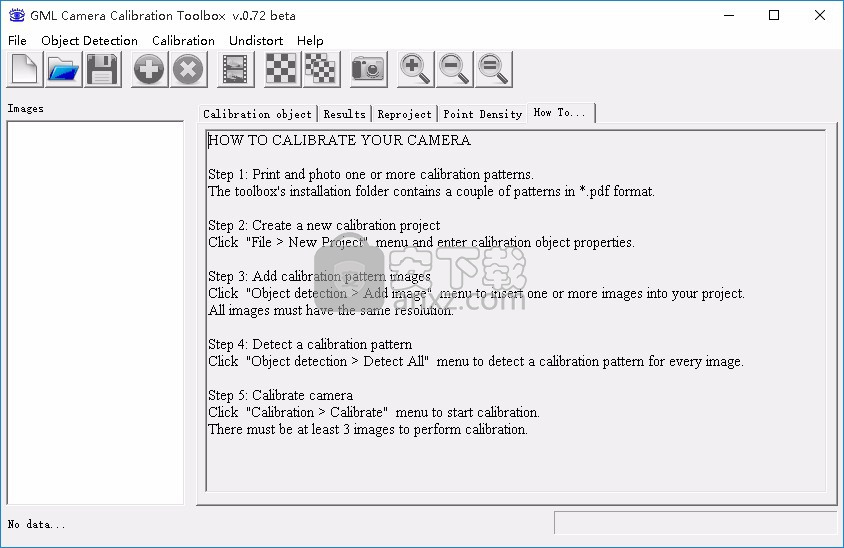
MSU GML相机校准用户指南
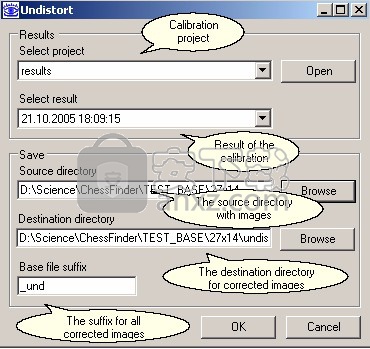
校准项目
校准结果
带有图像的源目录
已更正图像的目标目录
所有校正图像的后缀
非畸变程序校正径向和切向畸变。
单击Undistort - Undistort目录菜单,然后输入undistort属性。
相机校准
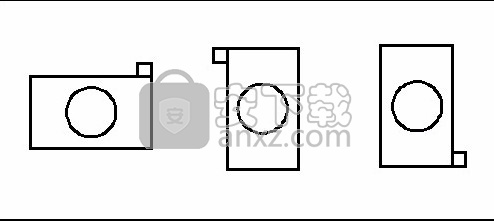
·外部正方形和物体边界之间的空白区域(下图中用红色标记)应至少为1平方宽,如下所示:
校准模式
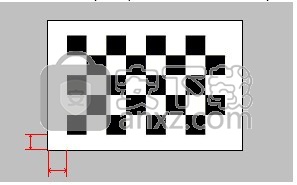
·所有方块必须清晰可见(未被遮挡)。
·使用三脚架
·拍摄25张以上的照片
·使用纸张尺寸“.3”等
·方形尺寸为3-5厘米
·图像上的棋盘必须位于摄像机矩阵的所有位置。 使用“点密度”选项卡控制校准图案的位置
·棋盘必须是飞机
·从棋盘顶部拍摄这些位置的照片
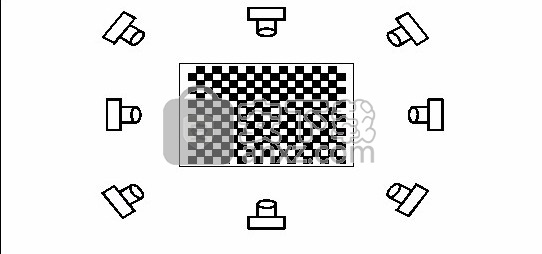
倾斜角度是恒定的(例如45度)
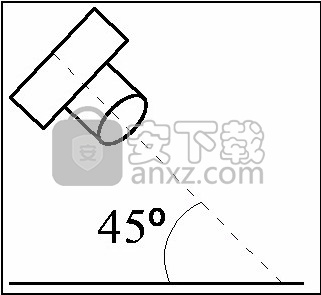
拍摄三个相机位置的照片
导出校准数据 - 张格式
选择菜单校准 - 导出校准数据 - 张格式以启动导出过程。
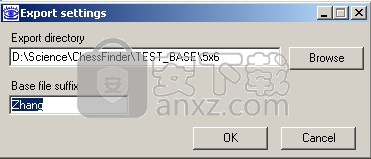
输入导出目录和基本文件后缀。
导出数据包括每个检测到的图像的两个文件。第一个(“image_name_”+“基本文件后缀”+“_2D”)包含相应的图像点。第二个(“image_name_”+“基本文件后缀”+“_3D”)包含对象点。
例如,检测到图像“Image1”的5x6校准图案。
文件“Image1_Zhang_2D”是
x(1,1)y(1,1)x(1,2)y(1,2)x(1,3)y(1,3)x(1,4)y(1,4)
x(2,1)y(2,1)x(2,2)y(2,2)x(2,3)y(2,3)x(2,4)y(2,4)
x(3,1)y(3,1)x(3,2)y(3,2)x(3,3)y(3,3)x(3,4)y(3,4)
x(4,1)y(4,1)x(4,2)y(4,2)x(4,3)y(4,3)x(4,4)y(4,4)
x(5,1)y(5,1)x(5,2)y(5,2)x(5,3)y(5,3)x(5,4)y(5,4)
行数是(校准图案宽度 - 1)* 2。
列数是校准图案高度 - 1。
文件“Image1_Zhang_3D”类似于“Image1_Zhang_2D”,但是点也具有坐标Z = 0。
导出校准数据 - Willson和Heikkila格式
选择菜单校准 - 导出校准数据 - Willson和Heikkila格式以启动导出过程。
导出数据包括每个检测到的图像的一个文件。该文件包含对象点和相应的图像点。
例如,检测到图像“Image1”的5x6校准图案。
文件“Image1_WH”是
X(1,1)Y(1,1)Z(1,1)x(1,1)y(1,1)
X(1,2)Y(1,2)Z(1,2)x(1,2)y(1,2)
X(1,3)Y(1,3)Z(1,3)x(1,3)y(1,3)
X(1,4)Y(1,4)Z(1,4)x(1,4)y(1,4)
X(2,1)Y(2,1)Z(2,1)x(2,1)y(2,1)
X(2,2)Y(2,2)Z(2,2)x(2,2)y(2,2)
...
导出校准数据 - 外部摄像机参数
选择菜单校准 - 导出校准数据 - 外部摄像机参数以启动导出过程。
导出数据包括每个图像的平移(T)和旋转(R)矢量。
文件格式为:
T(1,1)T(2,1)T(3,1)R(1,1)R(2,1)R(3,1)//为第一张图像
T(1,1)T(2,1)T(3,1)R(1,1)R(2,1)R(3,1)//为第二张图像
...
导出校准数据 - 外部摄像机参数(格式II)
选择菜单校准 - 导出校准数据 - 外部摄像机参数(格式II)以启动导出过程。
导出数据包括每个检测到的图像的一个文件。该文件包含逆外部相机矩阵。
文件格式为:
其中R是旋转矩阵,T是平移向量。
导出校准数据 - 固有摄像机参数
选择菜单校准 - 导出校准数据 - 内置摄像机参数以启动导出过程。
导出数据包括一个文件。该文件包含一个内在的相机矩阵。
文件格式为:
[fx 0 cx]
[0 fy cy]
[0 0 1]
cx,cy是主要点,fx,fy是焦距。
导出校准数据 - 带有失真的固有摄像机参数
选择菜单校准 - 导出校准数据 - 带有失真的固有摄像机参数以启动导出过程。
导出数据包括两个文件。具有后缀“内在”的第一个包含上述格式的固有相机矩阵。第二个具有后缀“失真”并且包含四个失真系数(前两个用于径向,第二个用于切向失真)。
导出校准数据 - 板之间的过渡参数
选择菜单校准 - 导出校准数据 - 板之间的过渡参数以启动导出过程。
如果场景中有两个或更多校准对象,则可以使用此过程保存其相对位置的信息。
生成的文件格式为:
[dx dy dz rx ry rz]
其中(dx dy dz)是旋转矢量,(rx ry rz)是平移矢量。这些矢量允许从当前对象的坐标系(在“结果”选项卡中可以找到的作为基础选择的对象的编号)传递到基础校准对象的坐标系中。文件的每一行对应于每个模板(基本模板除外),行的顺序与模板添加到项目的顺序相同。
人气软件
-

sql server 2008 r2 32&64位 1679 MB
/简体中文 -

vmware vcenter server 3348 MB
/简体中文 -

project2019激活工具 0.06 MB
/简体中文 -

LabVIEW 2017注册机 0.6 MB
/简体中文 -
LED MPlayer(LED控制屏软件) 13.8 MB
/简体中文 -

bartender2016补丁 1.7 MB
/简体中文 -

dynamips模拟器 145 MB
/简体中文 -

金山通行证注册机 0.93 MB
/简体中文 -

mydisktest(U盘扩容检测工具) 0.07 MB
/简体中文 -

sql server 2012 64位 2488 MB
/简体中文
 迅读PDF大师 3.1.7.9
迅读PDF大师 3.1.7.9  Lumion 8.0激活工具 绿色版
Lumion 8.0激活工具 绿色版  PentaLogix ViewMate(Gerber文件浏览转换工具) v11.14.21
PentaLogix ViewMate(Gerber文件浏览转换工具) v11.14.21  转转大师 v4.7 吾爱
转转大师 v4.7 吾爱  Ashampoo PDF Business(阿香婆PDF编辑器企业版) v1.1.1 中文
Ashampoo PDF Business(阿香婆PDF编辑器企业版) v1.1.1 中文  InstallShield 2018(软件打包工具) 附安装教程
InstallShield 2018(软件打包工具) 附安装教程