
QGroundControl(地面站软件)
v2018.11.02 汉化版- 软件大小:95.88 MB
- 更新日期:2020-03-27 16:51
- 软件语言:简体中文
- 软件类别:图像捕捉
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
QGroundControl是一款针对交通导航而设计的地面站软件,用户可以通过它浏览地球上的各个角落,同时可以看到每个地方的环境,它还可以根据不同的用户提供一些服务,包括导航,用户可以通过它浏览您即将要出发的目的地,可以为用户提供所有的路况信息;使用此程序,它可以为PX4或ArduPilot动力车辆提供完整的飞行控制和车辆设置,可以为新手提供详细的使用说明,让用户在使用过程中更容易上手,同时仍为经验丰富的用户提供了高端功能支持;支持完整设置/配置ArduPilot和PX4 Pro供电的车辆;可以为运行PX4和ArduPilot或使用MAVLink协议进行通信的任何其他自动驾驶仪的车辆提供飞行支持;支持自主设定飞行的任务计划,支持飞行地图显示,显示车辆位置,飞行轨迹,航路点和车辆仪表;系统还带有仪器显示屏覆盖的视频流,支持管理多辆车;需要的朋友速速下载吧!
软件功能
1、可以在软件配置无人机,可以对设备的飞行方案配置
2、提供地图功能,可以在软件直接查看地面站的信息
3、可以通过这款软件将无人机拍摄的数据发送到地面站
4、可以有更好接收数据,可以更好查看无人机传输的内容
5、支持地图查看,可以将离线地图加载到软件查看航线
6、支持放大地图,航拍的地图可以在软件放大查看
7、支持对飞行的任务设置,可以通过本软件规划你的飞行任务
8、QGroundControl可以在地图上显示当前飞行的速度,可以控制飞行路线
9、支持返航设置,直接在软件上控制飞行器返航
软件特色
1、一款专业的地面站软件。
2、为任何支持MAVLink的无人机提供全面的飞行控制和任务规划。
3、为ArduPilot或PX4 Pro动力车辆提供配置。
4、主要目标是首次使用和专业用户。
5、在Windows,OS X,Linux,iOS和Android上运行。
6、所有代码都是开源代码,因此您可以根据需要进行贡献和发展。
7、通过飞行堆栈讨论服务器和gitter提供支持。
8、源代码存储在Github中。
9、简单的用户和开发人员文档使QGroundControl易于使用和自定义。
安装步骤
1、用户可以点击本网站提供的下载路径下载得到对应的程序安装包
2、只需要使用解压功能将压缩包打开,双击主程序即可进行安装,弹出程序安装界面
3、可以根据自己的需要点击浏览按钮将应用程序的安装路径进行更改

4、弹出以下界面,用户可以直接使用鼠标点击下一步按钮
5、现在准备安装主程序,点击安装按钮开始安装
6、弹出应用程序安装进度条加载界面,只需要等待加载完成即可
7、根据提示点击安装,弹出程序安装完成界面,点击完成按钮即可,安装过程中会弹出组件题海安装,根据需要安装
使用说明
启动QGroundControl。
通过USB,遥测无线电或WiFi将车辆连接到地面站设备。QGroundControl应该检测到您的车辆并自动连接。
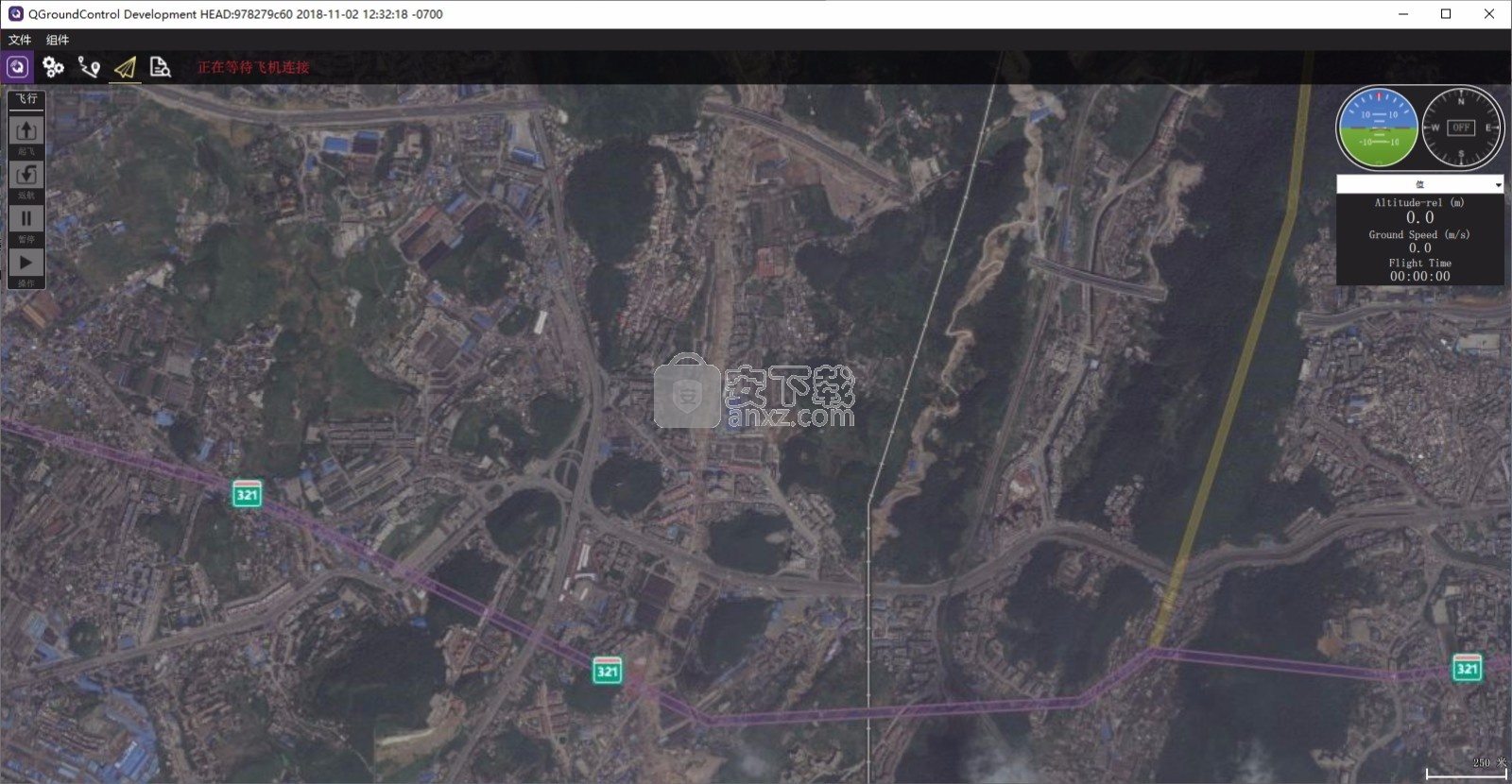
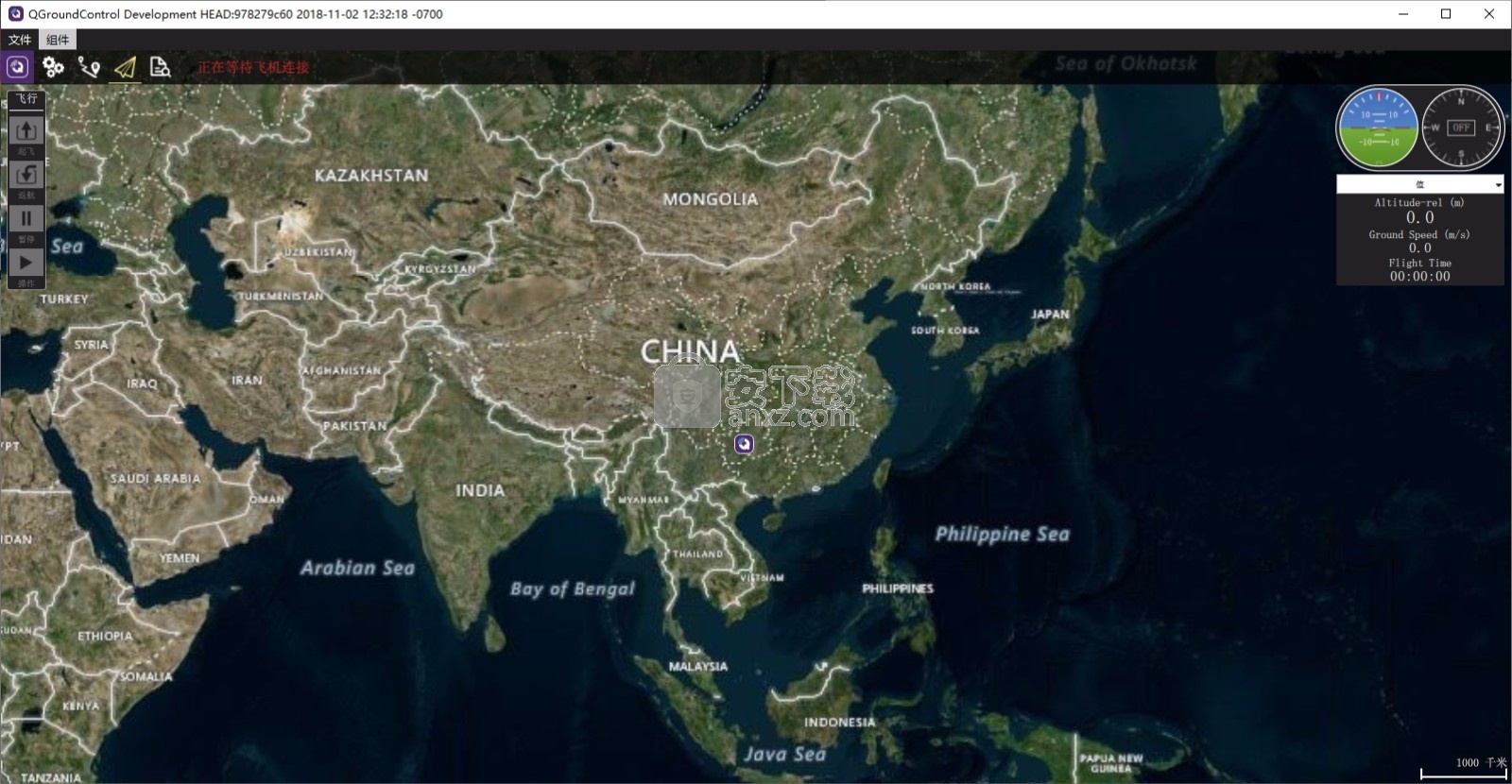
而已!如果车辆已准备好飞行,则 QGroundControl应该显示飞行视图,如下所示(否则它将打开设置视图)。
熟悉QGroundControl的一个好方法是开始实验:
使用工具栏在主视图之间切换:
设置:配置QGroundControl应用程序。
设置:配置和调整车辆。
计划:创建自主任务。
飞行:监视飞行中的车辆,包括流媒体视频。
单击工具栏上的状态图标以查找所连接车辆的状态。
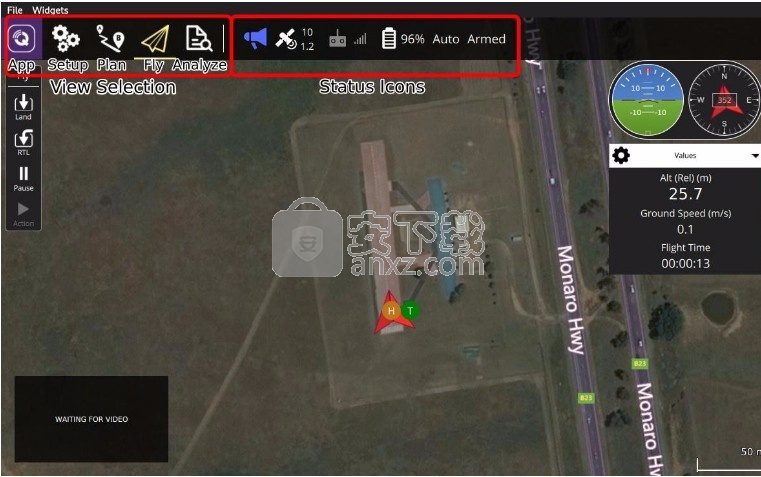
主工具栏
主菜单/工具栏提供对不同应用程序视图的访问,以及已连接车辆的高级状态信息。除“ PlanView”(带有一个图标可将您带回到“飞行”视图)外,所有视图中的菜单均相同。
视图选择图标
以下图标用于在主视图之间切换。即使没有连接车辆,这些也会显示。
设置,配置 QGroundControl应用程序。
设置,配置和调整车辆。
计划,创建自治任务。
飞行在飞行中,监视您的车辆,包括流媒体视频。
分析,下载日志,对调查任务中的图像进行地理标记,然后访问MAVLink控制台。
状态图示
QGroundControl连接到车辆时,将显示状态图标。这些显示车辆的高级状态,可以单击以查看更多详细信息。
车辆消息,单击以显示来自车辆的消息的下拉列表。如果有重要消息,它将变为屈服符号。
GPS状态,显示卫星计数和当前hdop。
RC RSSI,RS信号强度信息。
遥测RSSI,遥测发出强度信息。
电池,剩余电量百分比。
飞行模式,当前飞行模式。单击以更改飞行模式。
RTK GPS勘测状态
显示您的RTK GPS勘测过程的进度。
飞行视图,飞行视图用于在飞行中命令和监视车辆。
您可以使用它来:
运行自动的飞行前检查清单。
控制任务:开始,继续,暂停和继续。
引导车辆布防 / 撤防 / 急停,起跳 / 土地,改变飞行高度,去或轨道的特定位置,并返回/ RTL。
在地图视图和视频视图之间切换(如果有)
显示当前车辆的视频,任务,遥测和其他信息,并在连接的车辆之间切换。
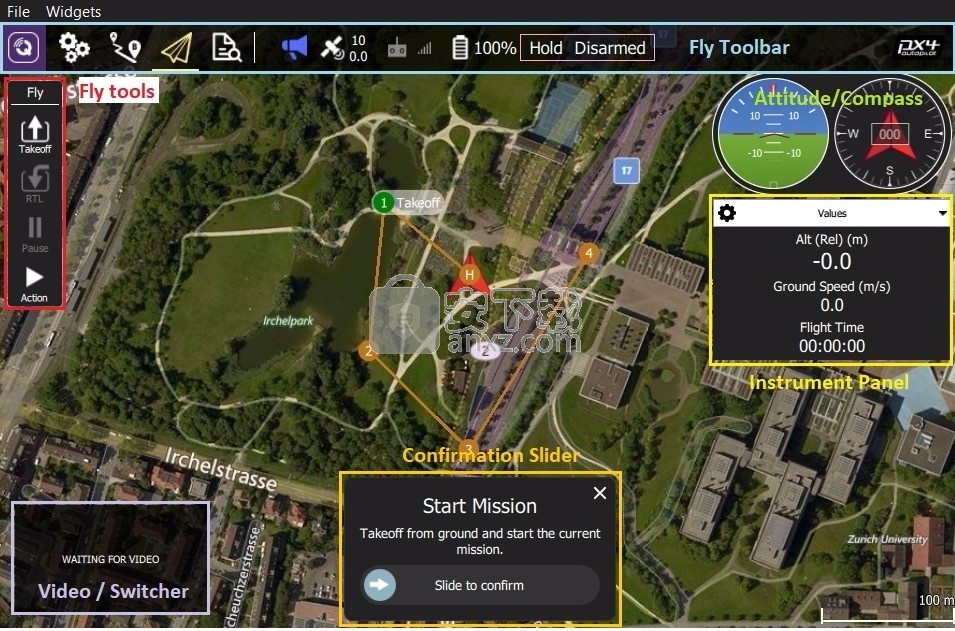
用户界面概述
上面的屏幕截图显示了fly视图的主要元素:
地图:显示所有已连接车辆的位置以及当前车辆的任务。
您可以拖动地图以使其移动(一定时间后地图会自动重新居中)。
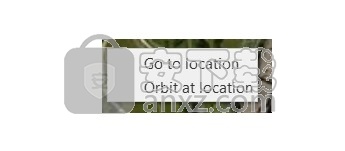
飞行之后,您可以单击地图以设置“前往”或“ 在轨道上”的位置。
飞行工具栏:传感器的关键状态信息(GPS,电池,RC控制)和车辆状态(飞行模式,布防/撤防状态)。
选择传感器指示器以查看更多详细信息。
按飞行模式文本(例如“保持”)以选择新模式。并非每种模式都可用。
按布防/撤防文本切换布防状态。如果要飞行,您可以按此文本至“ 紧急停车”。
飞行工具:您可以使用以下工具:
在起飞/着陆之间切换。
暂停/重启当前操作(例如着陆或任务)。
安全返回(也称为RTL或返回)。
“ 操作”按钮为当前状态提供了其他适当的选项(这些选项覆盖在“ 确认滑块”上)。行动包括改变高度或继续执行任务。
启用印前检查清单(默认情况下禁用工具选项)。
仪表板:一个多页小部件,显示车辆信息,包括:遥测,摄像头,视频,系统运行状况和振动。
视频/切换器:在窗口中的视频或地图之间切换。
按下元素可将视频和地图切换到前景。
QGroundControl支持通过车辆UDP连接传输RTP和RTSP视频。它还支持直接连接的UVC设备支持。视频自述文件中进一步讨论了QGC视频支持。
甲遥测覆盖作为字幕文件自动生成
确认滑块:上下文相关滑块,用于确认请求的操作。滑动以开始操作。按X取消。
还有许多其他元素默认情况下不显示/仅在某些条件下显示。例如,仅当您有多辆车时才显示多车选择器,并且只有在启用了适当的设置后才显示预检清单工具按钮。
仪表板
仪表板是一个多页小部件,可显示有关当前车辆的信息,包括:遥测,摄像头,视频,系统运行状况和振动信息。
默认页面显示车辆遥测-使用右侧的下拉菜单选择其他选项。
值(遥测)
值页面显示遥测信息。默认情况下,海拔高度(相对于家乡位置)和地面速度。
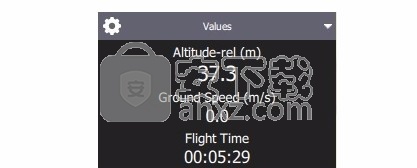
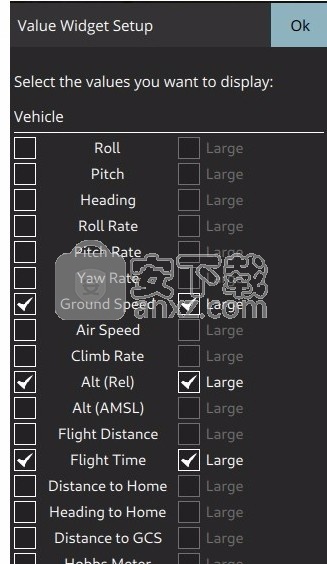
您可以通过按面板左上方的小齿轮图标来配置要显示的信息。每个值都可以正常或“大”尺寸显示(大尺寸在页面中每行仅显示一个值,而正常显示2)。
相机
摄像机页面用于配置和控制摄像机。对于直接连接到飞行控制器的摄像机,唯一可用的选项是摄像机触发:

当连接到支持MAVLink摄像机协议的摄像机时,您还可以配置和使用它提供的其他摄像机服务。例如,如果您的相机支持视频模式,则可以在静止图像捕获和视频模式之间切换,以及开始/停止录制。
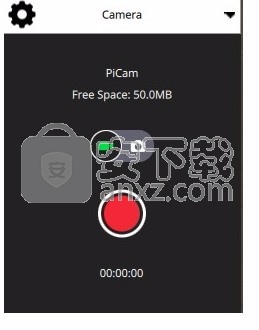
可以通过页面左上方的齿轮图标更改高级设置。
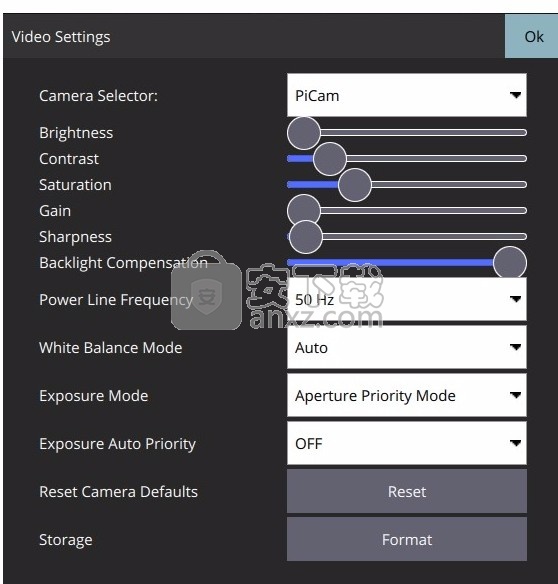
显示的大多数设置取决于摄像机(它们在其MAVLink摄像机定义文件中定义)。最后,一些常用设置是硬编码的:照片模式(单次/定时),照片间隔(如果有时间间隔),重置相机默认值(向相机发送重置命令),格式(存储)
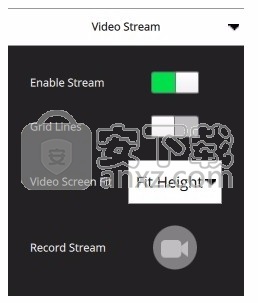
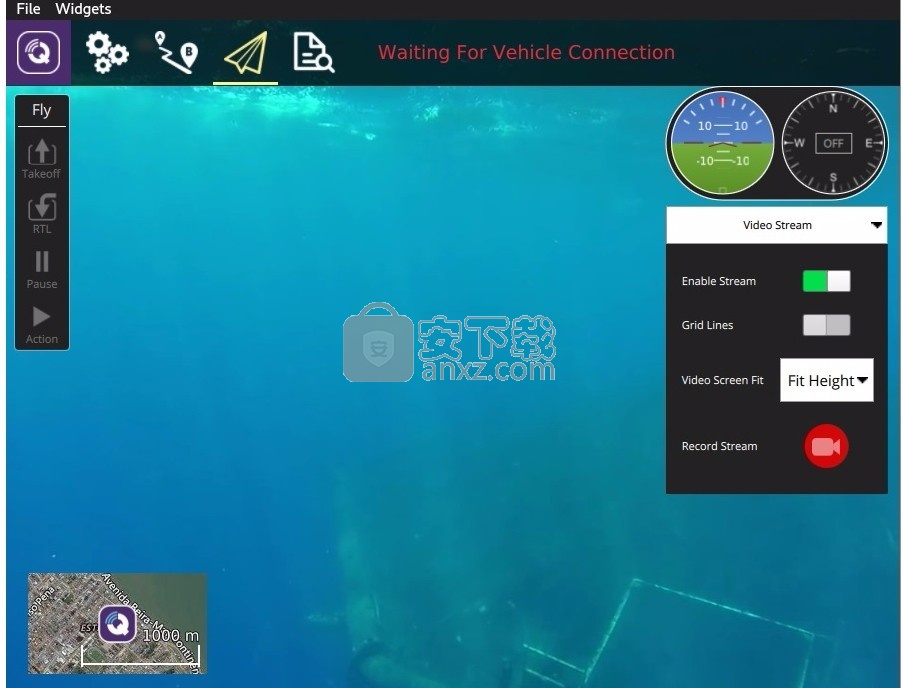
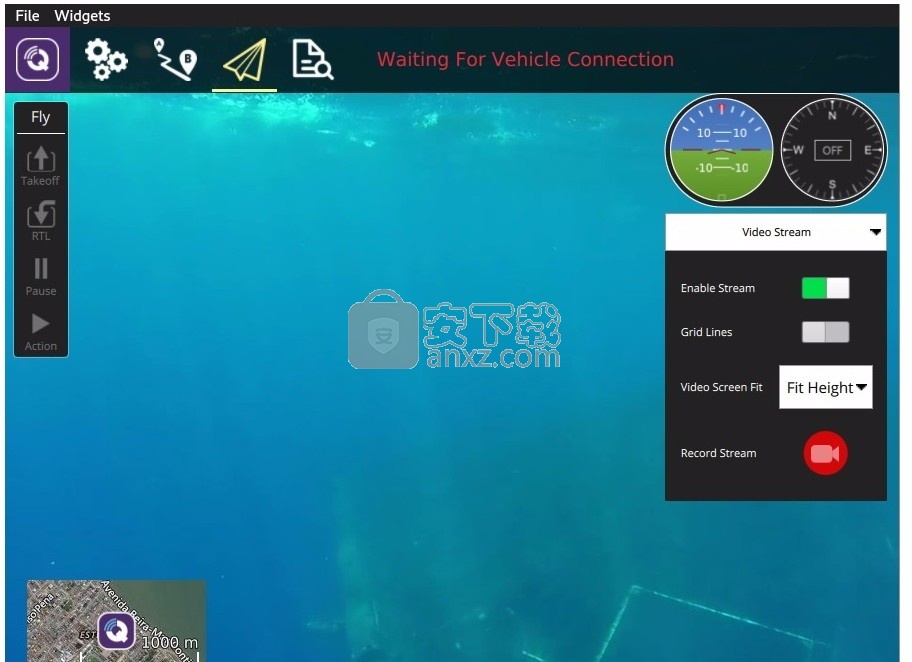
视频流
视频页面用于启用/禁用视频流。启用后,您可以启动/停止视频流,启用网格覆盖,更改图像适合屏幕的方式以及使用QGC在本地录制视频。
健康
健康页面显示您车辆中系统的健康状况。 如果任何系统更改为不正常,QGroundControl将自动切换到此页面。

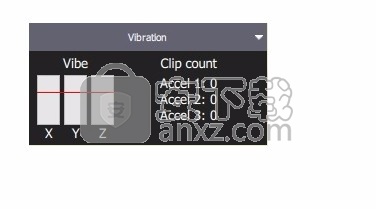
振动
振动页面显示当前的振动水平和片段计数。
动作/任务
以下各节描述了如何在Fly View中执行常见的操作/任务。
许多可用选项取决于车辆类型及其当前状态。
飞行前检查清单
自动的飞行前检查清单可用于执行标准检查,以检查车辆的配置是否正确以及是否可以安全飞行。
对于您的清单,首先通过导航到“ 应用程序设置”>“常规”>“飞行视图”并选中“ 使用飞行前检查清单”复选框来启用该工具。然后,该工具将添加到“ 飞行工具”中。按下以打开清单:
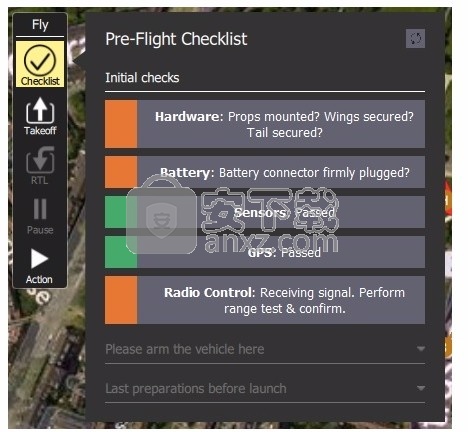
执行完每个测试后,请在用户界面中选择它以将其标记为完成。
臂
通常,QGroundControl不需要您明确武装车辆;如果您开始执行任务或起飞,这将为您完成。
武装车辆会启动电动机以准备起飞。
要为车辆设防,请在飞行工具栏中选择“已撤防 ” ,然后使用确认提示框。

如果几秒钟后仍未起飞,车辆通常会自动解除武装。
撤防
撤防车辆会使电动机停止运转(使车辆安全)。解除车辆选择武装在飞工具栏当车辆降落。
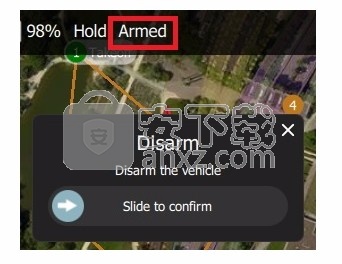
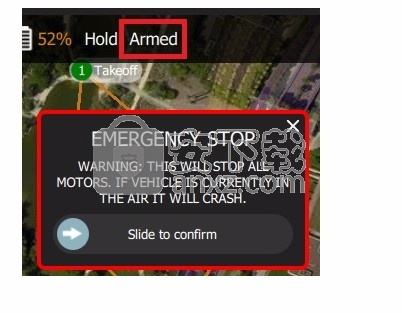
在飞行过程中解除车辆的防盗叫紧急停车
紧急停止
紧急停止实际上与在飞行中使车辆解除武装相同。您的车辆会坠毁!
解除车辆选择武装在飞工具栏当车辆飞行。
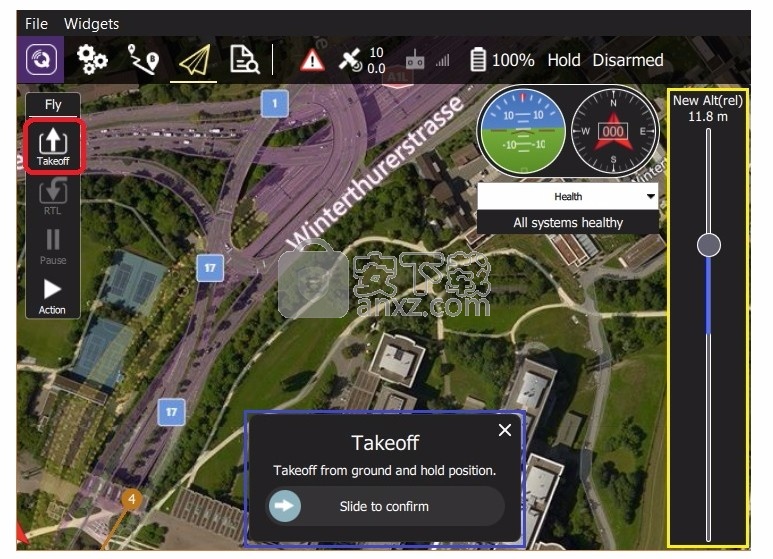
脱掉
如果您要开始执行多直升机任务,QGroundControl将自动执行起飞步骤。
起飞(降落时):
按下飞行工具中的起飞按钮(起飞后将切换为着陆按钮)。
(可选)在右侧垂直滑块中设置起飞高度。
使用滑杆确认起飞。
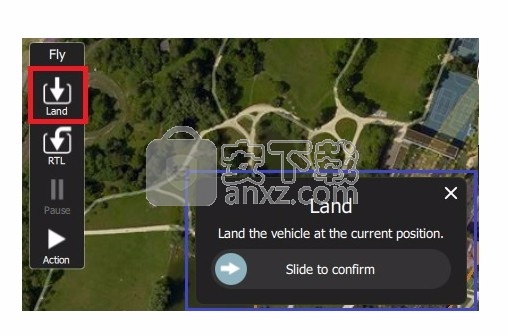
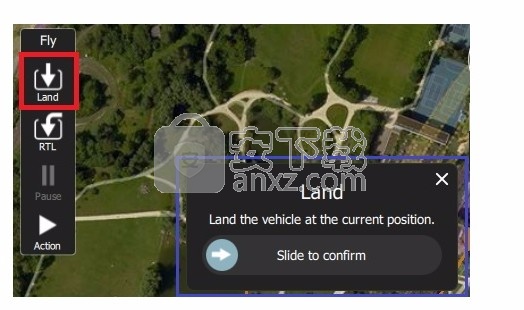
土地
您可以在飞行中随时降落到当前位置:
按土地的按钮飞行工具(这将切换到土地登陆,登陆时按钮)。
使用滑块确认着陆。
RTL /返回
飞行中随时可以返回原位:
在飞行工具中按RTL按钮。
使用滑块确认RTL。
根据其类型和配置,车辆也可能会降落在原位。
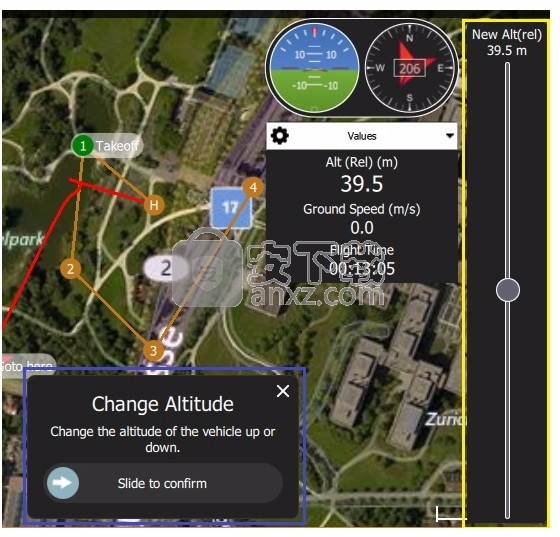
变更海拔
您可以在飞行中更改高度,除非在执行任务时:
按下飞行工具上的“ 动作”按钮
从对话框中选择“ 更改海拔高度”操作。
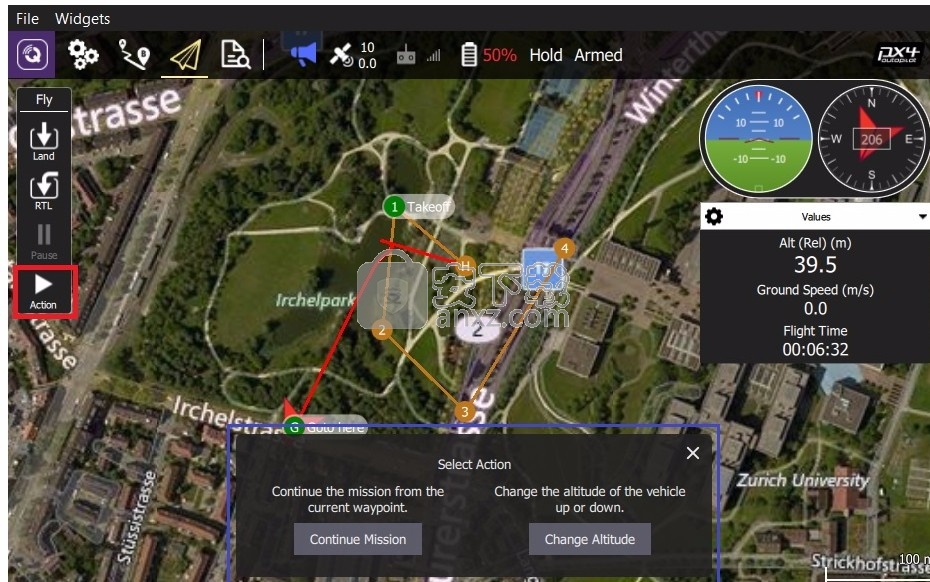
将垂直滑块移至所需的高度,然后拖动确认滑块以开始操作。
前往位置
起飞后,您可以指定要飞往特定位置。
按下要车辆移动的地图,然后在弹出窗口中选择“ 转到位置 ”。
该位置将与确认滑块一起显示在地图上。
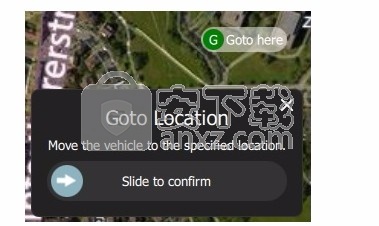
准备好后,拖动滑块以开始操作(或按X图标取消操作)。
定位点必须设置在距车辆1公里以内(在QGC中进行硬编码)。
轨道位置
起飞后,您可以指定要绕特定位置飞行。
在地图上按(在所需轨道的中心附近),然后在弹出窗口的位置选择“ 轨道 ”。
拟定的轨道将与确认确认者一起显示在地图上。
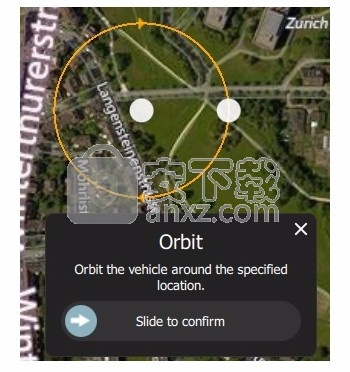
选择并拖动中央标记以移动轨道位置。
选择并拖动外圆上的点以更改轨道半径
准备好后,拖动滑块以开始操作(或按X图标取消操作)。
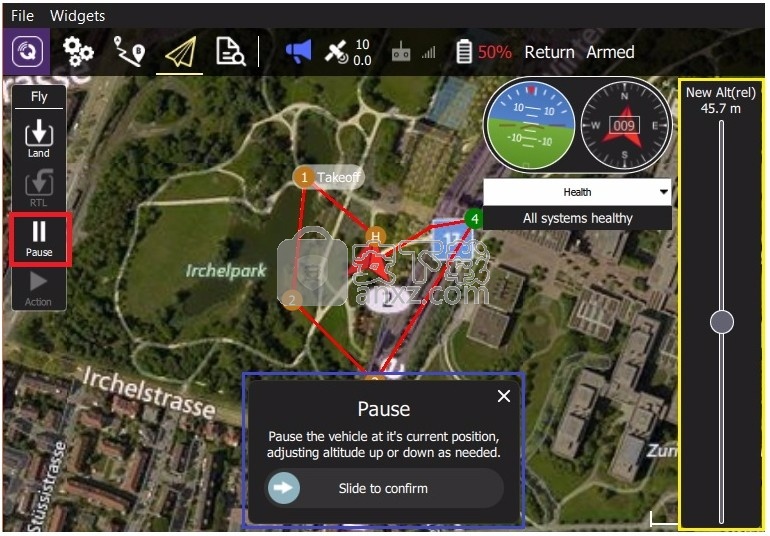
暂停
您可以暂停大多数操作,包括起飞,着陆,RTL,任务,就地飞行。暂停时的车辆行为取决于车辆类型。通常,多旋翼飞机会盘旋,固定翼飞机会盘旋。
您无法暂停Goto定位操作。
暂停:
按下“ 飞行工具”中的“ 暂停”按钮。
(可选)使用右侧的垂直滑块设置新的高度。
使用滑块确认暂停。
任务
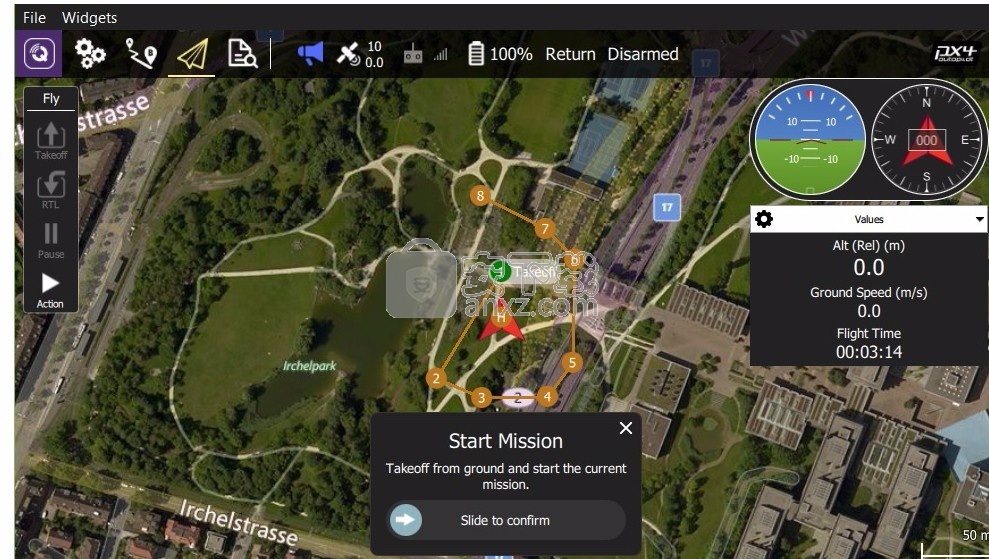
开始任务
您可以在车辆着陆时启动任务(默认情况下通常会显示“启动任务确认”滑块)。
从着陆开始任务:
按下飞行工具上的“ 动作”按钮
从对话框中选择“ 开始任务”操作。
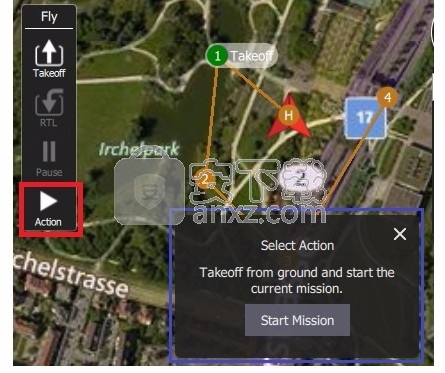
(显示确认滑块)
出现确认滑块时,将其拖动以开始任务。

继续执行任务
您可以在飞行时从下一个航点继续执行任务(起飞后,默认情况下通常会显示“ 继续执行任务”确认滑块)。
继续和恢复任务不同!“继续”用于重新启动已暂停或已起飞的任务,因此您已经错过了起飞任务命令。当您使用RTL或在任务途中降落时(例如更换电池),然后希望继续下一个任务项目(即,它将您带到任务的目标地点),则使用“恢复任务”从您的位置继续执行任务)。
您可以继续执行当前任务(除非已经执行任务!):
按下飞行工具上的“ 动作”按钮
从对话框中选择“ 继续任务”操作。

拖动确认滑块以继续执行任务。

恢复任务
恢复任务被用于执行之后恢复执行任务RTL /返回或土地一个任务内(以便,例如,以执行更换电池)。
如果要更换电池,请在断开电池连接后不要从车辆上断开QGC。插入新电池后,QGroundControl将再次检测到车辆并自动恢复连接。
着陆后,系统将提示您一个“ 飞行计划完成”对话框,该对话框为您提供了从飞行器中删除计划,将其留在飞行器上或从经过的最后一个航点继续执行任务的选项。
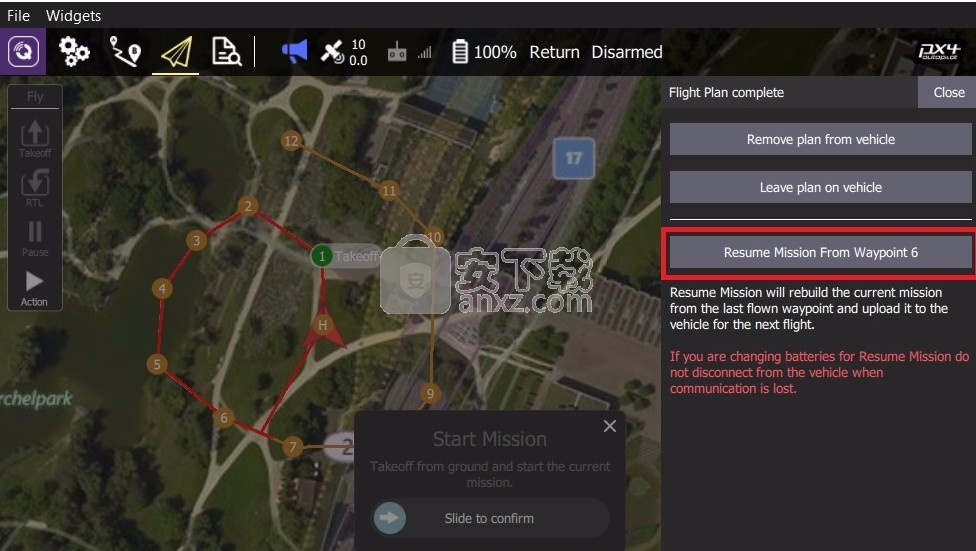
如果您选择继续执行任务,则QGroundControl将重建任务并将其上传到车辆。然后使用“ 开始任务”滑块继续执行任务。
下图显示了在上面显示的“返回”之后重建的任务。
任务不能简单地从车辆执行的最后一个任务项目中恢复,因为在最后一个航路点可能有多个项目会影响任务的下一阶段(例如,速度命令或摄像头控制命令)。取而代之的是,QGroundControl从飞行的最后一个任务项目开始,重新构建任务,并自动在任务前面添加任何相关命令。
降落后删除任务提示
任务完成并且车辆着陆并撤防后,系统会提示您将任务从车辆中移出。这是为了防止过时的任务遗留在车辆上而可能导致意外行为的问题。
显示影片
启用视频流后,QGroundControl将在地图左下方的“视频切换器窗口”中显示当前所选车辆的视频流。您可以在任何地方按下切换器,将“ 视频”和“ 映射到”切换到前景(下面我们将视频显示在前景中)。
在应用程序设置>常规标签>视频中配置/启用了视频流。
您可以使用切换台上的控件进一步配置视频显示:

通过拖动右上角的图标来调整切换台的大小。
通过按下左下方的切换图标隐藏切换器。
通过按左上角的图标来分离视频切换器窗口(一旦分离,您就可以像操作系统中的任何其他窗口一样移动并调整窗口的大小)。如果关闭分离的窗口,切换台将重新锁定到QGC Fly视图。
录视频
如果摄像机和车辆支持,则QGroundControl可以在摄像机本身上启动和停止视频记录。QGroundControl还可以记录视频流并将其保存在本地。
摄像机上存储的视频质量可能更高,但地面站的录制容量可能会更大。
录制视频流(在GCS上)
视频流记录是在视频流仪器页面上控制的。按下红色圆圈开始录制新视频(每次按下圆圈都会创建一个新的视频文件);录制过程中,圆圈将变为红色方块。
视频流录制是在“ 应用程序设置”>“常规”选项卡中配置的:
视频录制 -指定录制文件格式和存储限制。
视频默认情况下以Matroska格式(.mkv)保存。此格式在出现错误的情况下相对强大,可以防止损坏。
其他流视频保存在应用程序加载/保存路径下。
存储的视频仅包括视频流本身。要录制显示了QGroundControl应用程序元素的视频,您应该使用单独的屏幕录制软件。
在摄像机上录制视频
使用相机工具页面开始/停止在相机上进行视频录制。首先切换到视频模式,然后选择红色按钮开始录制。

重播飞行数据
此功能主要用于自动驾驶仪开发人员 / 车辆创建者。它仅在桌面版本(Windows,Linux,Mac OS)上受支持。
该重播飞行数据功能,用户可以重放日志遥测,使过去的或有问题的航班审查。可以开始,暂停,停止,重新开始飞行等。
QGroundControl将飞行重放视为活动连接。当您暂停/停止播放时,地面站将报告“通信丢失”,并等待断开连接或收到更多消息。
重播航班:
断开所有活动连接。
选择应用程序设置>常规>飞行视图
选中显示遥测日志重播状态栏以切换屏幕底部的飞行重播栏。
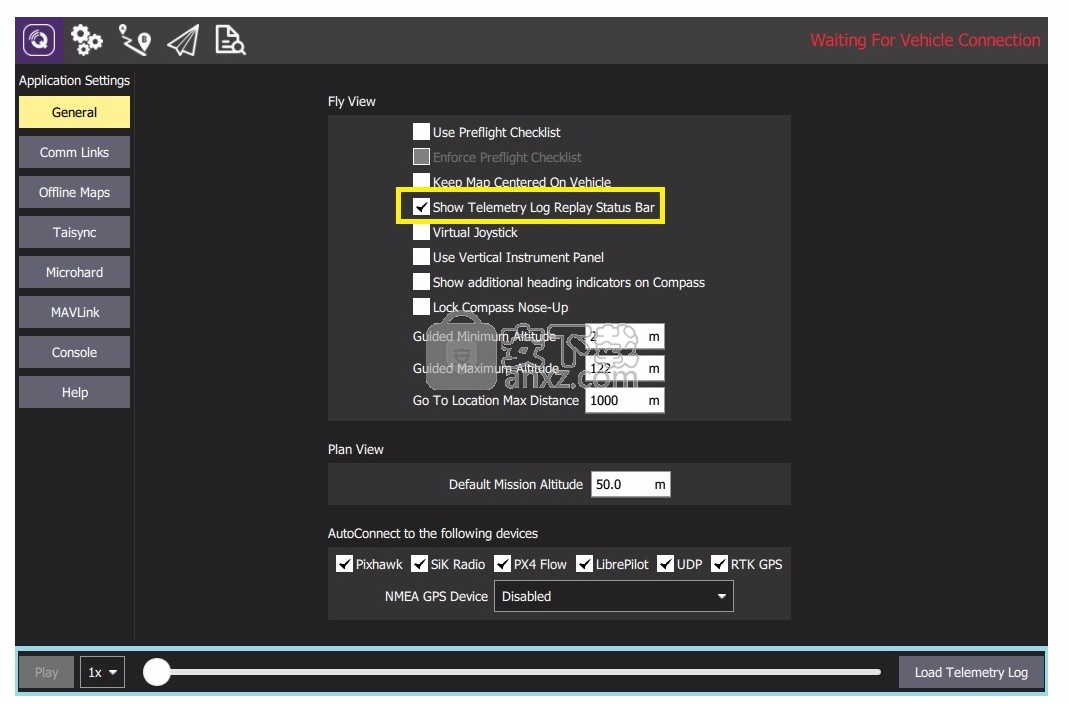
选择栏中的“ 加载遥测日志”按钮以显示文件选择对话框。
选择一个日志文件以从可用的遥测日志中重播。
QGroundControl将立即开始播放日志。
加载日志后,您可以使用:
暂停/播放按钮暂停并重新开始播放。
将滑块拖动到日志中的新位置。
为速率选择器选择运行日志的速度。
要停止中继(即加载新文件以重播),请先暂停飞行,然后选择“ 断开连接”(出现时)。断开连接后,将显示“ 负载遥测日志”按钮。
平面图
该计划视图用于规划的自主任务为您的车辆,并将其上传到车辆上。计划好任务并将其发送到车辆后,您便可以切换到飞行视图以执行任务。
如果固件支持,则还可用于配置GeoFence和Rally点。
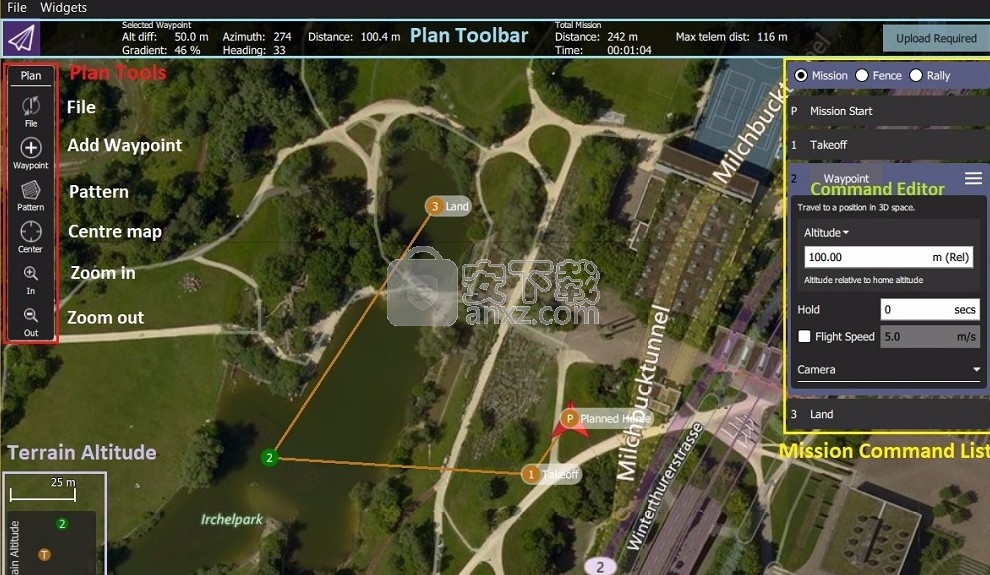
用户界面概述
上面的屏幕截图显示了一个简单的任务计划,该计划从在计划的原始位置(H)起飞开始,飞过三个航路点,然后降落到最后一个航路点(即,航路点3)。
UI的主要元素是:
地图:显示当前任务的编号指示器,包括“ 计划中的家园”。单击指示器以选择它们(以进行编辑),或在指示器周围拖动以重新放置它们。
计划工具栏:当前选定航路相对于先前航路点的状态信息,以及整个任务的统计信息(例如,水平距离和任务时间)。
Max telem dist是计划住宅与最远航路点之间的距离。
连接到车辆后,它还会显示一个“ 上传”按钮,可用于将计划上传到车辆。
计划工具:用于创建和管理任务。
任务命令列表/叠加图:显示任务项目的当前列表(选择要编辑的项目)。
地形高度叠加:显示每个任务命令的相对高度。
它向您显示与当前所选航路点相关的信息以及整个任务的统计信息。
计划任务
在较高级别上,创建任务的步骤是:
更改为平面视图。
向任务添加航点或命令,并根据需要进行编辑。
将任务上传到车辆。
更改为飞行视图并执行任务。
以下各节说明了视图中的一些详细信息。
计划的原位
“ 计划视图”中显示的“ 计划的房屋”用于在计划任务时(即,甚至车辆可能未连接到车辆时)设置近似起点。QGC使用它来估计任务时间并绘制航点线。

您应该将计划的起始位置移动/拖动到计划起飞的大致位置。在“ 任务设置”面板中设置了计划的原始位置的高度。

飞行视图会显示车辆固件在布防时设置的实际原始位置(车辆将在此位置以“返回/ RTL”模式返回)。
计划工具
该计划工具用于添加单个航路点,简化复杂几何形状的任务创建,上传/下载/保存/恢复任务以及导航地图。主要工具如下所述。
中心地图,放大,缩小工具可帮助用户更好地查看和浏览“ 计划”视图地图(它们不会影响发送到车辆的任务命令)。
添加航点
单击添加航点工具将其激活。启用后,在地图上单击将在单击的位置添加新的任务航路点。该工具将保持活动状态,直到再次选择它为止。添加航路点后,可以选择它并向四周拖动以更改其位置。
文件(同步)
“ 文件”工具用于在地面站和车辆之间移动任务,并从文件中保存/恢复任务。该工具会显示,!以指示您尚未发送给车辆的任务变更。
在执行任务之前,您必须将其上传到车辆。
该文件工具提供以下功能:
上传(发送到车辆)
下载(从车辆装载)
另存为文件,包括另存为KML文件。
从文件加载
全部删除(从平面图和车辆中删除所有任务航路点)
图案
该模式工具简化任务的创建飞行复杂的几何形状,包括调查和结构扫描。
任务命令列表
视图右侧列出了当前任务的任务命令。顶部是一组选项,可在编辑任务,GeoFence和集会点之间进行切换。在列表中,您可以选择各个任务项目以编辑其值。

任务指挥编辑
单击列表中的任务命令以显示其编辑器(您可以在其中设置/更改命令属性)。
您可以通过单击命令名称来更改命令的类型(例如:Waypoint)。这将显示如下所示的“ 选择任务命令”对话框。默认情况下,这仅显示“基本命令”,但是您可以使用“ 类别”下拉菜单显示更多信息(例如,选择“ 所有命令”以查看所有选项)。
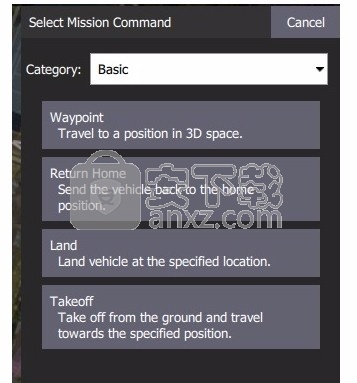
每个命令名称右侧都有一个菜单,您可以单击该菜单来访问其他选项,例如插入和删除。
可用命令列表将取决于固件和车辆类型。示例可能包括:航点,开始图像捕获,跳转至项目(重复任务)和其他命令。
任务设定
“ 任务开始”面板是出现在任务命令列表中的第一项。它可用于指定可能影响任务开始或结束的数字默认设置。
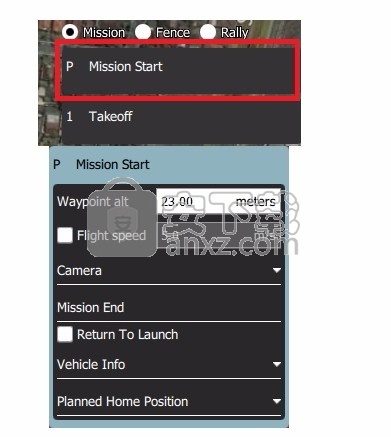
任务默认值
航点alt
设置添加到计划中的第一个任务项目的默认高度(后续项目采用上一个项目的初始高度)。这也可以用于将计划中所有项目的高度更改为相同的值。计划中有项目时,如果您更改值,将提示您。
飞行速度
为任务设置一个不同于默认任务速度的飞行速度。
任务结束
任务结束后返回发射
如果您想让车辆在完成最后一项任务后返回/ RTL,请选中此复选框。
计划的原位
“ 计划的原位”部分使您可以在计划任务时模拟车辆的原位。这使您可以查看从起飞到任务完成的车辆航路轨迹。

这只是计划的原始位置,应将其放置在计划从其启动车辆的位置。它对执行任务没有实际影响。设防时,车辆的实际原位由车辆本身设置。
该部分允许您设置海拔高度并将其设置为地图中心 (可以通过在地图上拖动将其移动到其他位置)。
相机
摄像头部分允许您指定要采取的摄像头动作,控制云台以及将摄像头设置为照片或视频模式。

可用的摄影机动作为:
不变(继续执行当前操作)
拍照(时间)
拍照(远距离)
停止拍照
开始录制视频
停止录制视频
车辆资讯
车辆的适当任务命令取决于固件和车辆类型。
如果在连接车辆时计划任务,则将从车辆确定固件和车辆类型。本部分允许您在未连接到车辆时指定车辆固件/类型。

计划任务时可以指定的附加值是车辆的飞行速度。通过指定此值,即使未连接到车辆,总的任务或勘测时间也可以估算出来。
故障排除
任务(计划)上载/下载失败
计划上载和下载可能会在嘈杂的通信链接上发生故障(影响任务,地理围栏和集会点)。如果发生故障,您应该在QGC UI中看到类似于以下内容的状态消息:
任务转移失败。重试传输。错误:任务写入任务计数失败,超过了最大重试次数。
链接的丢失率可以在“设置视图”>“ MAVLink”中查看。丢失率应为低个位数(即最大2或3):
高个位数的丢失率会导致间歇性故障。
较高的损失率通常会导致100%的故障。
问题是由飞行堆栈或QGC中的错误引起的可能性要小得多。要分析这种可能性,您可以为计划上载/下载打开控制台日志记录并查看协议消息流量。
人气软件
-

HyperSnap(屏幕截图工具) 14.3 MB
/简体中文 -

ApowerMirror(手机投屏电脑) 78.88 MB
/简体中文 -

FastStone Capture 5.45 MB
/简体中文 -

FSCapture(屏幕截图软件) 5.35 MB
/简体中文 -

锐尔文档扫描影像处理软件 104.00 MB
/简体中文 -

捷速OCR文字识别软件 47.00 MB
/简体中文 -

录屏软件 ApowerREC 48.7 MB
/简体中文 -

录屏王 Apowersoft Screen Recorder Pro 28.2 MB
/简体中文 -
屏幕录像专家 7.00 MB
/简体中文 -

抓文字工具 ABBYY Screenshot Reader v14 绿色注册版 202.00 MB
/简体中文
 桌面录屏软件(EV录屏工具) 5.2.5
桌面录屏软件(EV录屏工具) 5.2.5  高清游戏录像 Bandicam 7.1.1.2158
高清游戏录像 Bandicam 7.1.1.2158  金舟录屏大师 4.0.4.0
金舟录屏大师 4.0.4.0  camtasia 2019汉化版(电脑桌面录制工具) v19.0.7 附带安装教程(内置注册码
camtasia 2019汉化版(电脑桌面录制工具) v19.0.7 附带安装教程(内置注册码  TechSmith SnagIt 2019(屏幕截图与录像软件) 附带安装教程
TechSmith SnagIt 2019(屏幕截图与录像软件) 附带安装教程  Easy Screen Capture & Annotation(屏幕捕捉与注释) v3.0.0.0
Easy Screen Capture & Annotation(屏幕捕捉与注释) v3.0.0.0