
Meshroom(3D重建软件)
v2019.2.0 绿色版- 软件大小:299.88 MB
- 更新日期:2020-08-10 15:57
- 软件语言:英文
- 软件类别:图像处理
- 软件授权:免费版
- 软件官网:待审核
- 适用平台:WinXP, Win7, Win8, Win10, WinAll
- 软件厂商:

软件介绍 人气软件 下载地址
Meshroom是一款基于AliceVision摄影测量计算机视觉框架而开发的开源3D重建软件,能够帮助用户解决非常多的设计以及重建问题,同时新版本还提供了更完整的传感器数据库,更好的匹配以及镜头初始化的明确状态,添加对摄像机装备的支持,如果您使用多个同步设备进行采集,则可以添加更多约束’支持使用投影的光模式进行重建,并使用另一个图像集进行纹理处理,更好地估计要重建的空间以限制重建区域,这避免了在主要对象/环境周围重建低质量和无用的区域;直接对SfM结果进行网格划分的新选项,这提供了一种快速的解决方案来获取草图网格,减少流水线的MVS部分中的IO和中间文件;需要的用户可以下载体验
新版功能
可视化:特征提取的新可视化模块。
支持RAW图像文件,在UV贴图中添加对UDIM的支持
纹理:大大提高纹理质量。
纹理:速度改进,通过同时遍历多个输出纹理来优化性能。
支持RAW图像文件:Libraw更新并修复了它在OpenImageIO中的用法
纹理化:添加对UDIM的支持,使用多波段混合技术可大大提高纹理化质量
网格划分:在Alembic中导出密集点云。
网格划分:导出全部原始密集点云的新选项(剪切和过滤之前具有所有3D点候选)。
网格划分:添加了一个选项来导出每个顶点的颜色数据,MeshFiltering可以正确保留颜色。
软件特色
移至PySide2/Qt 5.13
SfMDataIO:更改Alembic SfMData的根节点,以便与其他3D图形应用程序更好地互操作。
提高日志显示和节点状态更新的性能。
Viewer3D:添加对顶点着色网格的支持。
meshroom_photogrammetry命令行的新管道输入,以及输入参数的次要修正。
网状网的新论点。
HDR:新的HDR模块,用于融合多个LDR图像。
PrepareDenseScene:添加实验选项以更正输入图像的曝光值(EV),以统一数据集的曝光。
FeatureExtraction:在Linux和Windows的发行版二进制文件中均包含CCTag。
ConvertSfMFormat:启用以在ConvertSfMFormat的图像白名单中使用简单的正则表达式。
这样可以根据摄像机的文件名过滤掉摄像机。
使用教程
用户可以直接通过此网站下载对应的安装包,然后即可进行解压,双击程序即可将其打开
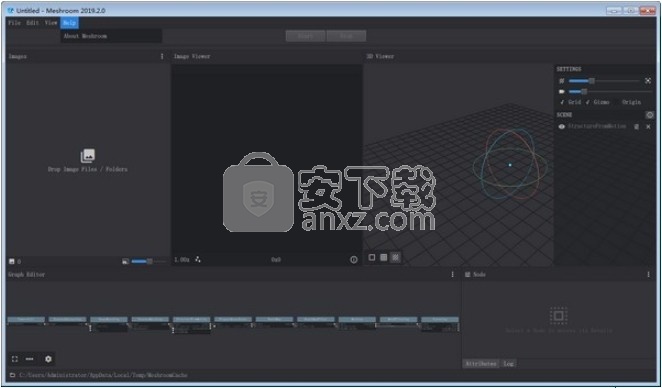
双击后,即可弹出对应的用户界面,整个用户界面的功能模块分布非常清晰
sensorDB:使用更多模型更新传感器数据库
sensorDB:使用FocalLengthIn35mmFilm元数据作为备用
sensorDB:改进元数据品牌/模型与传感器数据库的匹配
CameraInit:通过显式InstrinsicInitMode枚举对内部函数(序列号,错误/警告日志)进行新的管理
CameraInit:按预期修复序列号与内部特性分组的问题,并添加元数据“ AliceVision :: SensorWidth”(如果从FocalLength/ 估算,则添加“ AliceVision :: SensorWidthEstimated” FocalLengthIn35mmFilm)
CameraInit:如果缺少序列号则显式警告
SfM:添加对摄像机装备的支持。此信息用作SfM中的新约束。现在可以将此选项与localBA结合使用。您需要在输入图像文件中使用特定的文件夹层次结构(例如:“ / my / dataset / rig / 0 / DSLR_0001.JPG”,“ / my / dataset / rig / 1 / DSLR_0001.JPG”)来提供此功能信息。
PrepareDenseScene:imagesFolders覆盖输入图像的新选项。这样可以使用带有为SfM和MVS零件投影的光图案的图像,并使用另一组图像进行纹理化。
网格融合:使用SfM地标(稀疏点云的网格)或将其与深度图组合的新选项
网格划分:添加选项estimateSpaceFromSfM以更好地估计重建的边界框并避免对环境进行无用的重建
MVS:减少IO和中间文件。在MVS管道中使用sfmData(而不是MVS种子,ini文件),并且在优化之前不要导出depthmap文件
ExportAnimatedCamera:改进的解决方案,可将SfM结果导出到动画相机中
PrepareDenseScene:删除恶意软件CameraConnection(现已在PrepareDenseScene中正确完成)
PrepareDenseScene:允许在渲染场上并行化
FeatureExtraction:在AKAZE中添加网格过滤(以避免在纹理良好的图像上过多的关键点)
DepthMap:修复SGMVolume中的内存泄漏
网格划分:使用法线修复OBJ的加载
系统:改进GPU检测和日志记录
DepthMap:默认情况下启用多个GPU的使用,并带有添加限制的选项
DepthMap:在单个循环中融合估计和优化(将“ computeDepthMapsPSSGM”与“ refineDepthMaps”融合)并使用相同的图像缓存
DepthMap:删除depthMapInfo文件并改用图像元数据
DepthMap:初始重构以提高可读性,以准备优化工作
SfM:重构localBA(现已与标准BA代码融合以避免冗余)
ConvertSfMFormat:用户现在可以指定视图白名单以过滤视图
SfM:用户只能提供初始对中的一张图像,它将自动选择第二张图像。这样可以确保从场景的特定部分开始重建,而无需手动选择图像对。
SfMTransform:允许选择一个视图作为坐标系的原点
从已知姿势开始的SfM增强:当sfm从现有的摄像机姿势开始但没有地标时,现在首先进行三角剖分。
LightingEstimation:新的模块,具有初步的低级方法来估计照明(球谐)
MeshDenoising:修复忽略参数的外部迭代降噪
网格划分:当BBox为空时,网格划分中的错误修复(无限循环)
SfM LocalBA:使用localBA时,减少使用稀疏BA(将阈值从100更改为20)的最小图像数量,以加快大型重建速度。
较小的构建修复程序以与ceres 2兼容。
适用于Centos 7和Ubuntu 18的新Docker映像
新的“打包”包装
重构拆分的sfm / sfmData / sfmDataIO
新的可见性重新映射方法:Push,PullPush
通过更好的图像选择提高纹理质量
SfM支持多个文件夹以实现功能和匹配
PopSiftImageDescriber:如果不使用,则不进行初始化
离线相机跟踪改进
导出动画摄像机ABC
导出未失真的图像和滤镜选项
MeshroomMaya脚本集成图像平面
cameraSensors数据库搜索中的次要修复
如果没有可用的传感器宽度信息,但存在FocalLengthIn35mmFilm元数据,则进行新的后备
ImageMatchingMultiSfM:添加“ a_a + a_b”选项
人气软件
-

photoshop 2020(图像处理工具) 1894 MB
/简体中文 -

photoshop2020(图像处理工具) 176.88 MB
/简体中文 -

Paint Tool SAI 2(SAI2绘画软件) 6.79 MB
/简体中文 -
SUAPP 5.6 MB
/简体中文 -

lumion10补丁 8.88 MB
/简体中文 -

photoshop cc 2018中文 1475 MB
/简体中文 -

ps cc2019下载20.0 中文 1731 MB
/简体中文 -

Photoshop CS 8.01增强版 150 MB
/简体中文 -

smartdeblur(图片模糊处理工具) 41.7 MB
/简体中文 -

lumion10.0中文 18545 MB
/简体中文
 SARscape(雷达图像处理工具) v5.2.1
SARscape(雷达图像处理工具) v5.2.1  美图云修 v6.9.2
美图云修 v6.9.2  金鸣表格文字识别大师 5.69.6
金鸣表格文字识别大师 5.69.6  图怪兽 4.1.3.0
图怪兽 4.1.3.0  美图秀秀 7.5.7.5
美图秀秀 7.5.7.5  光影魔术手 v4.5.9.415
光影魔术手 v4.5.9.415 








